Zhiheng Chen
📍 Ithaca, NY
📧 Email: czhiheng@umich.edu | ericczh1@outlook.com
🔗 CV | Google Scholar | GitHub
Hello! I'm a Ph.D. student in Mechanical Engineering at University of Michigan-Ann Arbor. I received my Master of Science in Mechanical Engineering from Cornell University; my Master's research on spectral test function selections for weak-form sparse system identification was supervised by Professor Anastasia Bizyaeva (you can access my thesis here). Before that, I received my Bachelor of Science in Mechanical Engineering from University of Wisconsin-Madison.
Research Overview
Throughout my undergraduate and master’s studies, I have centered my research and academic focus on the modeling and control of dynamical systems.
Around this core, I developed a robust toolkit - ranging from dynamics, optimal control, and recursive estimation to numerical analysis and data-driven system identification - not as independent pursuits, but as necessary and interdependent tools to analyze, estimate, and shape the behavior of complex physical systems.
Specifically, my research interests include:
Analytical Dynamics Modeling
I am interested in the analysis of the kinematics and kinetics of dynamical systems based on mechanics principles.
- In my undergraduate research (summer 2023), I worked on the 3D hybrid dynamics modeling and numerical simulations of a legged hopping robot.
- As a self-driven project, I also modeled and simulated the 3D dynamics of a wobbling coin rolling along the ground (winter 2023).
- In summer and fall 2024, I worked in the Marine Robotics Laboratory on the dynamics modeling and simulations of a micro autonomous surface vehicle (MicroASV).
- One of my current research projects is the dynamics modeling of a flexible robotic fish derived from Hamilton's principle. The dynamics involve the sophisticated and interesting interactions among rigid bodies, elastic structures, and surrounding fluids. I have coded up a working simulator of the robotic fish and a preliminary parameter study in Julia. Ongoing efforts include parameter tuning and design optimization based on the dynamics model, using gradient-based and quasi-Newton algorithms.
Data-Driven Modeling
In addition to analytical modeling, I am also fascinated by system identifications and equation learning for dynamical systems.
- My Master's research project at Cornell University was on the weak formulation of the Sparse Identification of Nonlinear Dynamics (SINDy). We use Fourier-mode test functions, frequency-domain reformulations, and classical signal processing techniques to improve the interpretability, efficiency, and noise-robustness of weak-form SINDy. You can access my thesis here.
- In the MicroASV project, I also designed a weak formulation-based parameter estimation algorithm to iteratively refine the dynamics model.
- In Spring 2025, I designed the EKF-ST algorithm that combines the extended Kalman filter and sequential thresholding techniques. The algorithm enables recursive and simultaneous state estimations and equation learning.
Nonlinear Dynamics and Control
I am interested in the analysis and control of dynamical system based on the resulting models.
- I study fixed points, limit cycles, chaotic attractors, and bifurcations of nonlinear dynamical systems.
- In the legged hopping robot project, I designed aerial phase PD controllers to adjust the foot placement.
- In the MicroASV project, I designed LQR and variational principle-based (nonlinear) controllers for the robot, enabling it to accurately perform trajectory tracking tasks.
Publications
[1] Z. Chen, U. Fasel, and A. Bizyaeva. Fourier Weak SINDy: Spectral Test Function Design and Selection for Robust Model Identification. 8th Annual Learning for Dynamics & Control Conference (L4DC 2026). Paper (Accepted)
[2] Z. Chen and W. Wang. Modeling Elastic-Body Dynamics of Robotic Fish Using a Variational Framework. Paper
[3] K. Macauley, M. Zhao, Z. Chen, and W. Wang. Design and Control of Centimeter-Scale Reconfigurable Aquatic Modular Robots. IEEE Robotics and Automation Letters (RA-L). Paper
[4] Z. Chen and W. Wang. Dynamic Modeling and Efficient Data-Driven Optimal Control for Micro Autonomous Surface Vehicles. 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025). Paper
[5] K. Macauley, Z. Chen, and W. Wang. MicroASV: An Affordable 3D-Printed Centimeter-Scale Autonomous Surface Vehicle. 2025 IEEE International Conference of Robotics and Automation (ICRA 2025). Paper
[6] Y. Wang, J. Kang, Z. Chen, and X. Xiong. Terrestrial Locomotion of PogoX: From Hardware Design to Energy Shaping and Step-to-step Dynamics Based Control. 2024 IEEE International Conference of Robotics and Automation (ICRA 2024). Paper (Co-first author)
Project Demos
I am happy to share the demos of some of my projects mentioned in my research overview.
Rigid-Soft-Fluid Coupling Dynamics of a Robotic Fish
This is a project I am currently working on. I model the fish as a rigid head and an elastic body connected by a motor-driven revolute joint. I use Hamilton's principle, elastica theory, Lighthill's elongated body theory, and Ritz series approximations to obtain the projected weak form of the equations of motion (see paper). Then I code up the numerical simulations in Julia:
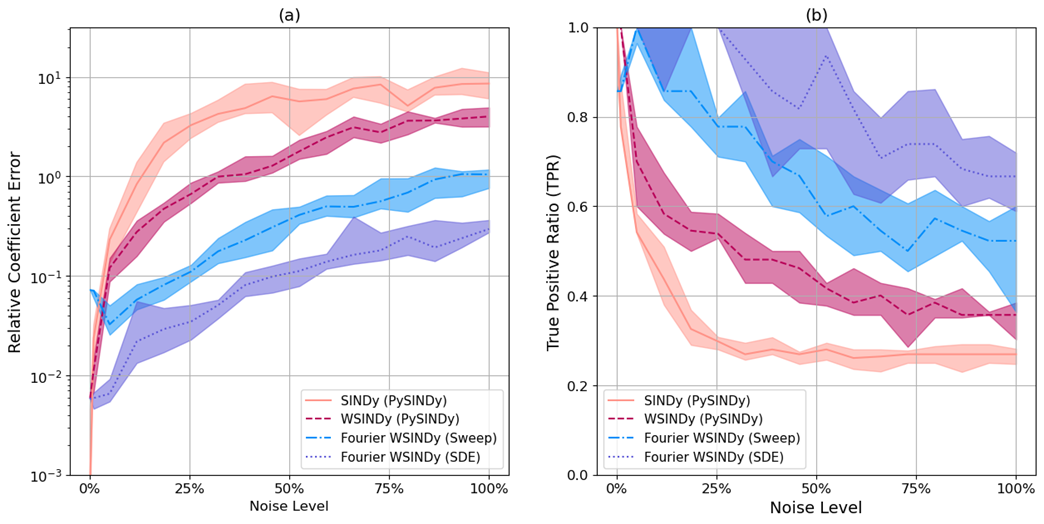
Fourier Weak SINDy
This was the project that led to my Master's research thesis and a paper published to L4DC 2026. We use Fourier-mode test functions for weak-form SINDy. This frequency-domain reformulation enables interpretable hyperparameter selections by spectral density estimation and an efficiency improvement by leveraging the Fast Fourier Transform. Fourier Weak SINDy shows improved robustness to measurement noise on multiple benchmark dynamical systems:
3D Contact Dynamics of a Rolling Disk
This was a self-driven project when I was an undergraduate student at UW-Madison. I modeled the 3D dynamics of the disk (size of a coin) using Lagrange's equations with 6 generalized coordinates. In the rolling phase, the equations of motion are solved in parallel with 3 constraint equations (2 nonholonomic constraints for roll without slip, and 1 holonomic constraint for the height of the contact point). I implememnted the numerical simulations of the disk in MATLAB:
Hybrid Dynamics of a Legged Hopping Robot
In my undergraduate research, I was responsible for the 3D hybrid dynamics modeling and numerical simulations of a single-legged hopping robot named PogoX. I modeled PogoX as 2 rigid bodies connected by a prismatic joint. The hybrid dynamics model consists of the aerial phase, the impact mapping, and the stance phase, assuming a smooth transition from the stance phase to the aerial phase. I coded up the numerical simulations in MATLAB:
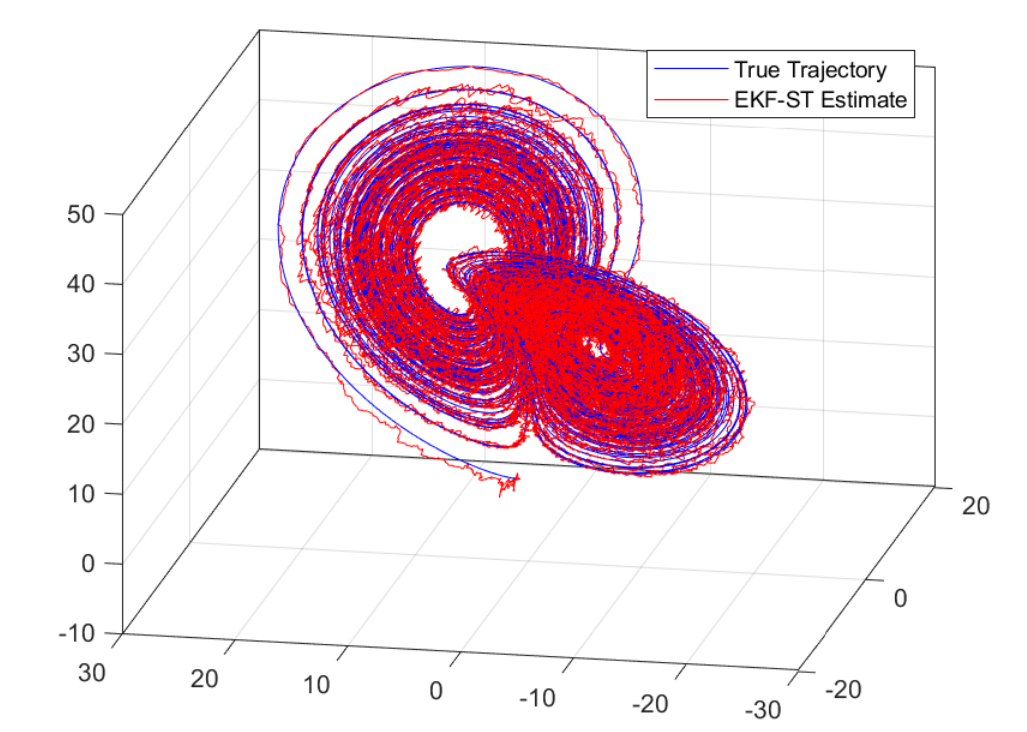
EKF-ST for Simultaneous State Estimation and Equation Learning
This is an individual course project from my Model-Based Estimation course at Cornell University. I devised the EKF-ST algorithm (extended Kalman filter with sequential thresholding). The algorithm enables simultaneous and recursively refined state estimations and sparse system identifications for nonlinear dynamical systems. EKF-ST adds a thresholding process to the original EKF prediction-update loops to prune the spurious basis functions and the corresponding covariances.
Moments
Outside of research, I enjoy swimming, practicing boxing, and (occasionally) rowing. I’m also passionate about rope-skipping — during an international competition, I placed 11th worldwide in the triple-under grand final and 7th nationally in the double-under final!
Here are a few videos from my training and competition moments:
{kind=link}